publications
(*) denotes equal contribution
2026
-

-
 Differentiable Contact Dynamics for Stable Object Placement Under Geometric UncertaintiesIEEE Robotics & Automation Letters (RA-L), 2026 [ICRA2026 Oral]
Differentiable Contact Dynamics for Stable Object Placement Under Geometric UncertaintiesIEEE Robotics & Automation Letters (RA-L), 2026 [ICRA2026 Oral]
2025
-
 "Stack It Up!": 3D Stable Structure Generation from 2D Hand-drawn SketchIn Proc. Conference on Robot Learning (CoRL), 2025 [Oral]
"Stack It Up!": 3D Stable Structure Generation from 2D Hand-drawn SketchIn Proc. Conference on Robot Learning (CoRL), 2025 [Oral] -
 “Set It Up”: Functional Object Arrangement with Compositional Generative ModelsInt. J. Robotics Research (IJRR), 2025
“Set It Up”: Functional Object Arrangement with Compositional Generative ModelsInt. J. Robotics Research (IJRR), 2025
2023

2022
2020
-
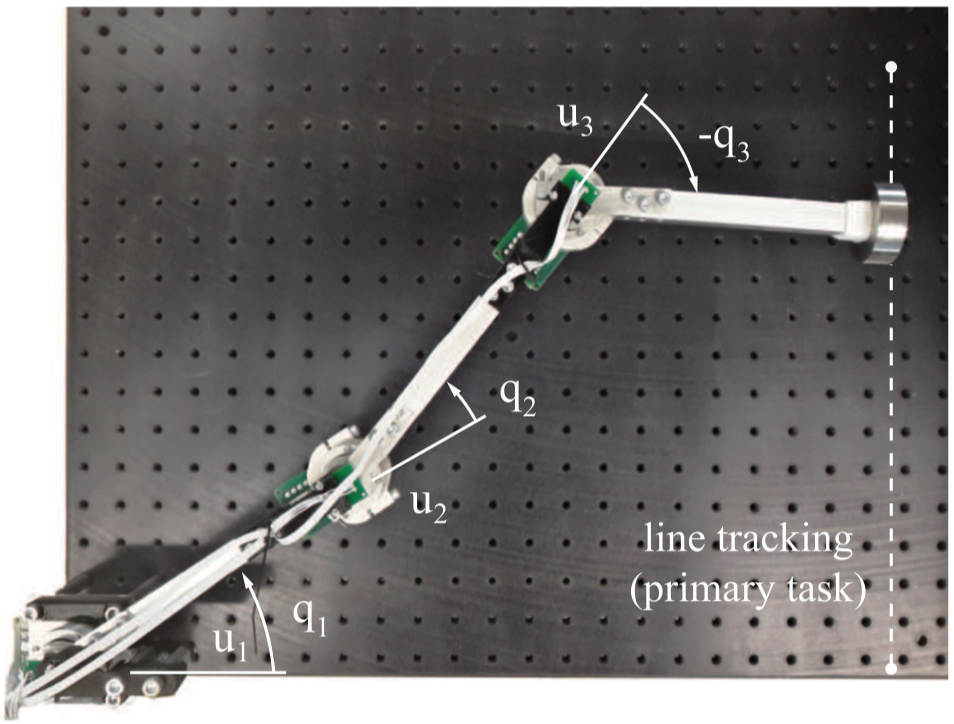 Operational Space Control Under Actuation Constraints Using Strictly Convex OptimizationIEEE Trans. on Robotics (T-RO), 2020
Operational Space Control Under Actuation Constraints Using Strictly Convex OptimizationIEEE Trans. on Robotics (T-RO), 2020
2019
-
 Constrained Feedback Control by Prioritized Multi-objective OptimizationIn Proc. IEEE Int. Conf. on Robotics & Automation (ICRA), 2019
Constrained Feedback Control by Prioritized Multi-objective OptimizationIn Proc. IEEE Int. Conf. on Robotics & Automation (ICRA), 2019